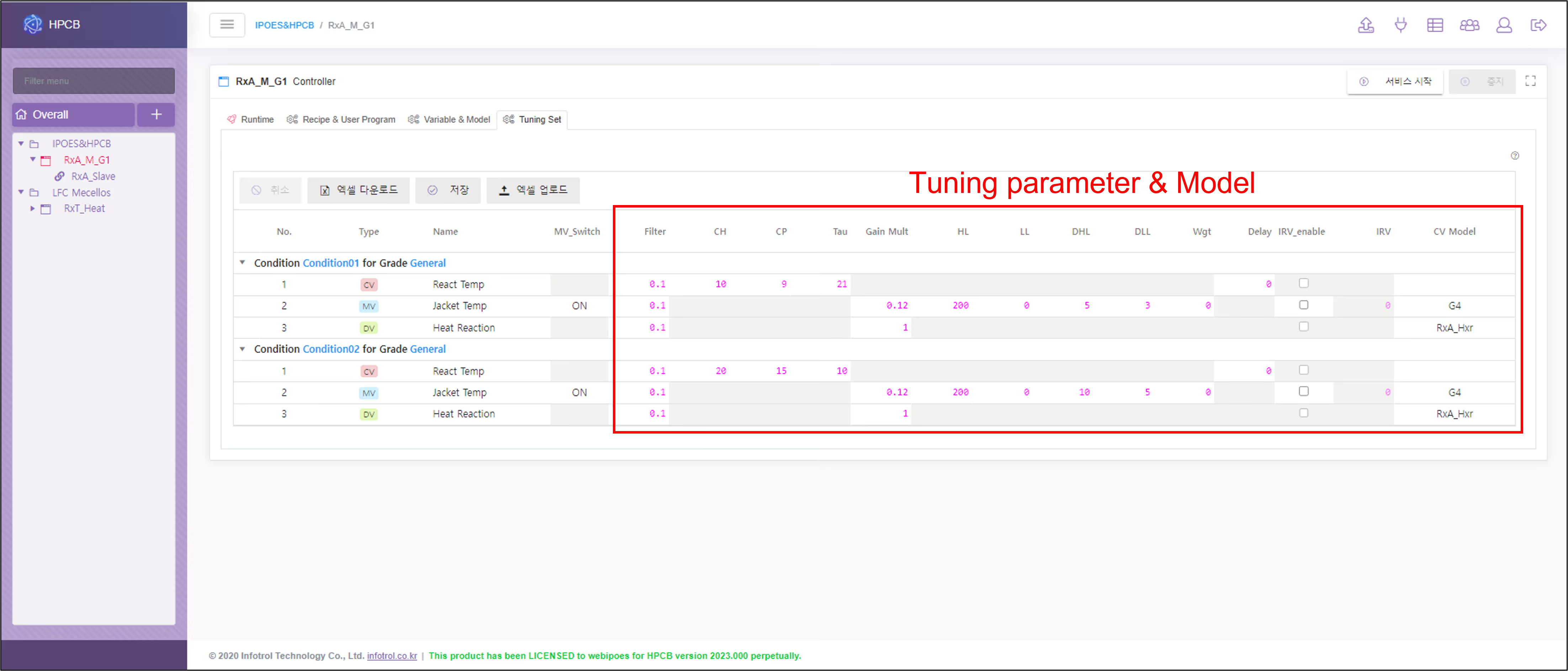
튜닝 파라미터
HPCB (배치용 계층적 예측 제어) 시스템에서 튜닝 매개변수는 제어 알고리즘의 성능을 최적화하기 위해 조정할 수 있는 변수를 나타냅니다.
이러한 매개변수는 컨트롤러의 작동 방식과 배치 프로세스를 얼마나 잘 조절할 수 있는지를 결정하는 데 중요한 역할을 합니다.
- 예측 지평선
이 매개변수는 제어기가 공정 동작을 예측하는 미래 타임스텝의 수를 결정합니다.예측 지평이 길수록 컨트롤러는 미래의 공정 동역학 및 장애를 고려할 수 있지만 계산 복잡성이 증가할 수 있습니다.
- 컨트롤 호라이즌
제어 지평선은 제어기가 적용하는 제어 동작의 길이를 정의합니다.컨트롤러가 얼마나 먼 미래까지 작업을 계획할지를 결정합니다.제어 기간이 길수록 컨트롤러는 장기 프로세스 목표를 고려할 수 있지만 보다 보수적인 제어 조치로 이어질 수 있습니다.
- 웨이트 및 페널티
HPCB에는 종종 여러 제어 목표를 포함하는 목적 함수의 최적화가 포함됩니다.
이러한 목표와 관련된 가중치와 패널티를 조정하면 사용자는 다양한 목표의 우선 순위를 지정할 수 있습니다.
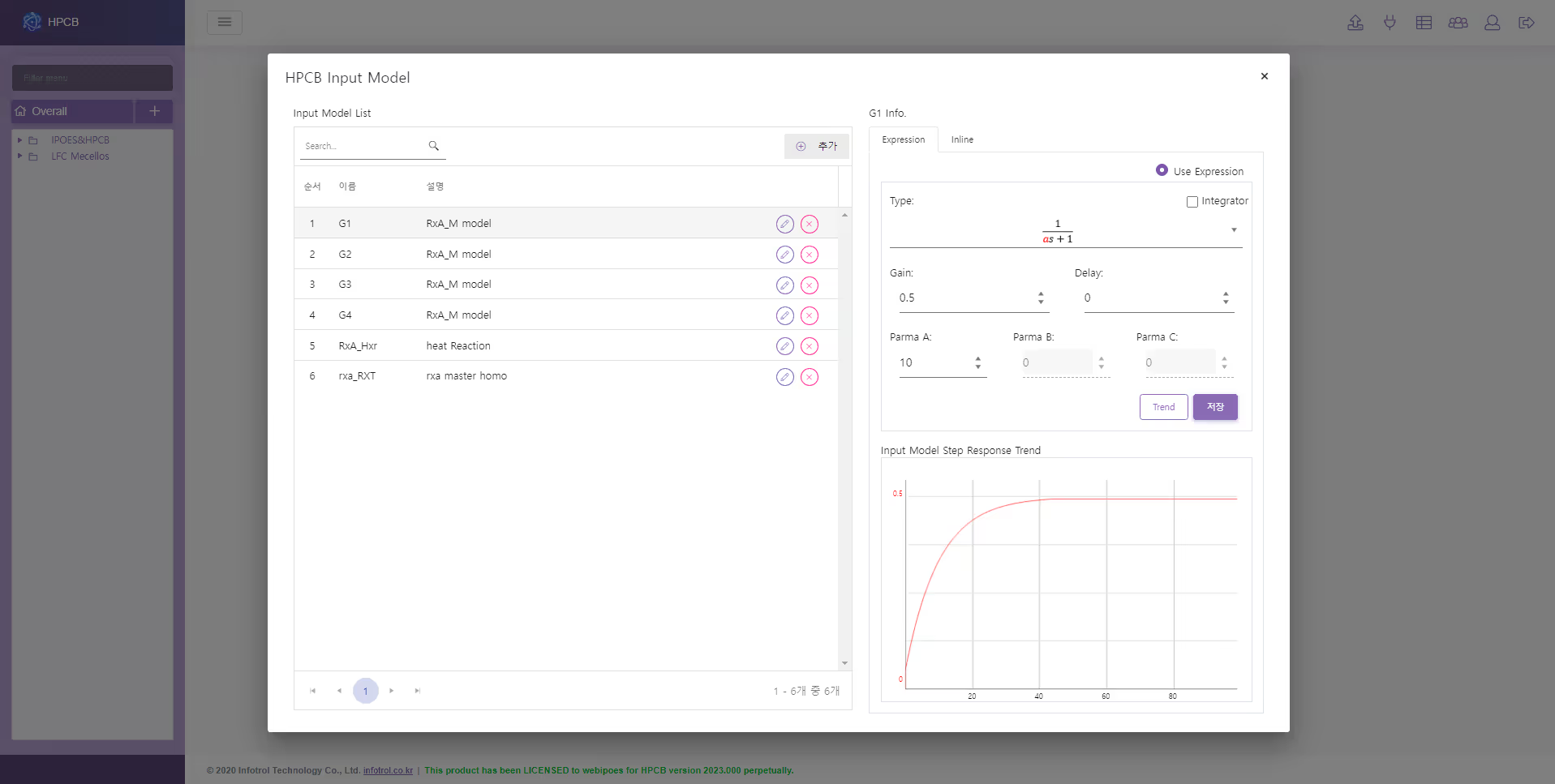
- 제약 조건
HPCB는 공정 변수 제한과 같은 다양한 제약 조건 하에서 작동하는 경우가 많습니다.제약 파라미터를 조정하려면 컨트롤러가 원하는 작동 범위 내에서 작동하도록 적절한 제한 및 페널티를 설정해야 합니다.
- 모델 파라미터
HPCB는 예측 및 제어를 위해 정확한 프로세스 모델을 사용합니다.
모델 파라미터를 조정하려면 모델의 파라미터를 조정하여 정확도를 높이고 실제 프로세스 동작에 맞게 조정해야 합니다.